

In the rapidly evolving landscape of unmanned aerial vehicles (UAVs), the divide between reliable flight control and high-level artificial intelligence has long been a bottleneck for developers. Building a drone that can stay airborne is one challenge; teaching it to perceive its environment, navigate GNSS-denied spaces, and process complex sensor data in real-time is an entirely different hurdle.
UTMSYS has stepped into this breach with the launch of the USX51 Computing Power Flight Controller, a sophisticated system architecture designed to fuse the proven reliability of the Pixhawk 6X with the high-performance edge-computing capabilities of the D Robotics RDK X5. By decoupling flight-critical tasks from intensive perception workloads, the USX51 promises to streamline the development of the next generation of autonomous robotics.
Main Facts: The Architecture of the USX51
The USX51 is not merely a component; it is an integrated ecosystem. At its core, the platform addresses the "compute-vs-control" conflict that plagues modern UAV design.
In traditional UAV configurations, developers often struggle to balance the real-time requirements of flight control loops with the resource-hungry demands of computer vision or sensor fusion. Overloading a flight controller with heavy perception tasks can lead to latency, jitter, or even catastrophic system failure. The USX51 solves this by physically and logically separating the two domains:
- The Flight Domain (Pixhawk 6X): This module remains the "gold standard" for flight stability. It manages the low-level, mission-critical tasks—attitude control, motor output, and safety protocols—using the robust PX4 Autopilot stack.
- The Intelligence Domain (RDK X5): The D Robotics RDK X5 acts as the "brain." With significant edge-computing power, it handles visual odometry, SLAM (Simultaneous Localization and Mapping), object detection, and high-level decision-making.
By leveraging this dual-architecture, the USX51 ensures that even if an AI algorithm experiences a momentary spike in processing load, the Pixhawk continues to fly the aircraft with uncompromising stability.
Chronology: From Concept to Deployment
The development of the USX51 did not happen in a vacuum. It is the culmination of years of industry frustration regarding the difficulty of integrating disparate flight and computing modules.
Early Development Phase: UTMSYS engineers identified that the most common failure points in commercial and research drones were related to wiring complexity, power distribution issues, and software compatibility between different flight stacks and companion computers.
Prototyping and Testing (Q3–Q4 2025): The development team focused on optimizing the communication bus between the Pixhawk 6X and the RDK X5. By utilizing high-speed interfaces like Ethernet and CAN, they ensured that data latency between the perception engine and the flight controller was minimized to near-zero levels.
Ecosystem Expansion (2026): Throughout early 2026, UTMSYS began fostering community-based project collaboration. The integration of ROS2 (Robot Operating System 2) workflows became a central pillar, allowing developers to move away from proprietary, closed-source code and toward a standardized, modular environment.
Official Launch: The release of the USX51 platform signals a shift in the market toward "off-the-shelf" autonomy. Instead of spending months building custom integration boards, engineers can now deploy a certified, pre-configured hardware stack that is ready for industrial-grade applications.
Supporting Data and Technical Specifications
The power of the USX51 lies in its connectivity and its ability to handle the "sensor deluge" typical of modern UAVs.
Interface Connectivity
To support diverse payloads, the system provides a robust suite of communication interfaces:
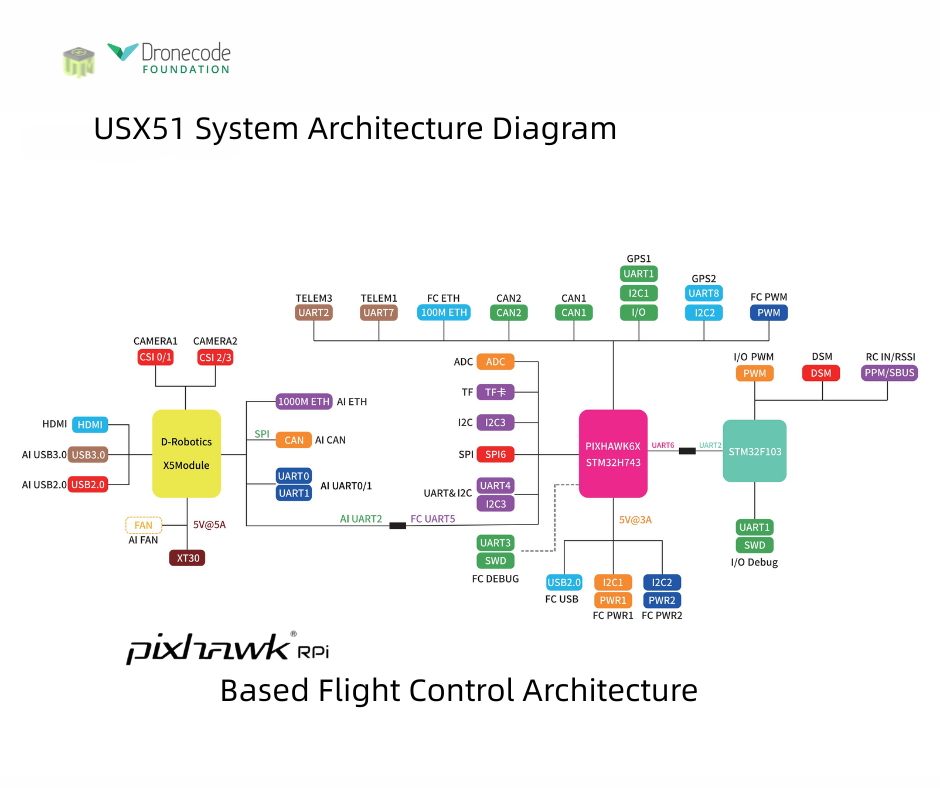
- Ethernet: Essential for high-bandwidth data transmission, such as high-definition camera feeds or LiDAR point clouds.
- CAN Bus: Provides a reliable, fault-tolerant network for communication between the flight controller and mission-critical sensors (e.g., electronic speed controllers, airspeed sensors).
- UART and I2C: Allows for the seamless integration of legacy sensors, thermal modules, and specialized industrial payloads.
Computational Performance
The integration of the RDK X5 module provides the necessary "TFLOPS" (Tera-Floating Point Operations per Second) to run neural networks on the edge. This is critical for applications like:
- Real-time Obstacle Avoidance: Detecting and maneuvering around dynamic obstacles in complex environments.
- Precision Landing: Utilizing visual markers to land with centimeter-level accuracy without reliance on GPS.
- Target Tracking: Using thermal or optical cameras to lock onto and follow specific objects.
Official Perspectives: The Developer’s View
According to the UTMSYS development team, the philosophy behind the USX51 is "integration as a service."
"We observed that the barrier to entry for advanced robotics wasn’t the lack of algorithms, but the complexity of the hardware stack," noted a spokesperson for the project. "When a research team has to spend 80% of their time troubleshooting power rails and communication protocols, they aren’t innovating. The USX51 removes that friction."
The platform’s reliance on the PX4 Autopilot stack is a deliberate choice to ensure longevity. PX4 is the industry-standard open-source flight control software, meaning that the USX51 is backed by a massive community of developers, security researchers, and aerospace engineers who are constantly auditing and improving the code.
Implications for the Industry
The release of the USX51 has profound implications for several sectors:
1. GNSS-Denied Navigation
Perhaps the most significant impact is in GNSS-denied environments. Whether navigating indoors, inside critical infrastructure like power plants, or in environments with heavy signal jamming, the USX51’s ability to run advanced visual SLAM locally means the drone can maintain position and orientation through vision alone.
2. VTOL and Complex Airframes
Vertical Take-Off and Landing (VTOL) aircraft are notoriously difficult to tune due to the transition between multi-rotor and fixed-wing flight modes. The USX51’s architecture provides a stable foundation for the complex control laws required for these transitions, giving researchers a reliable base for experimenting with aerodynamic configurations.
3. Democratization of AI in Robotics
By lowering the barrier to hardware integration, the USX51 makes high-level AI more accessible to small-to-medium enterprises (SMEs) and academic institutions. Companies that previously couldn’t afford the R&D costs to build a custom autonomous platform can now focus their resources on the application—be it agricultural monitoring, industrial inspection, or search-and-rescue operations.
Future Outlook: The Road Ahead
As the UAV industry matures, the focus is shifting from "how to fly" to "how to interact with the environment." The USX51 is a clear signal that the industry is entering an era of standardized, high-performance edge computing.
The next phase for the USX51 ecosystem will likely involve deeper integration with synthetic data training environments, such as NVIDIA Isaac Sim or Gazebo, allowing developers to test their perception models in a virtual world before deploying them to the physical USX51 hardware.
Furthermore, as the developer testing programs grow, the library of "off-the-shelf" drivers for various LiDAR, thermal, and multispectral sensors will expand. This creates a virtuous cycle: as more developers adopt the USX51, the ecosystem becomes more capable, which in turn attracts more developers.
Conclusion
The UTMSYS USX51 Computing Power Flight Controller is more than just a piece of hardware; it is a vital step toward a future where autonomous drones are as common and reliable as the tools in a tradesperson’s kit. By expertly marrying the Pixhawk 6X’s proven flight reliability with the RDK X5’s computational prowess, UTMSYS has provided a foundational architecture that will undoubtedly underpin many of the robotics breakthroughs of the coming decade. Whether for researchers pushing the boundaries of drone autonomy or engineers solving real-world industrial problems, the USX51 stands as a testament to the power of thoughtful, modular system design.



